03 / Tool preview
Coordinate Mapper — recorded session.
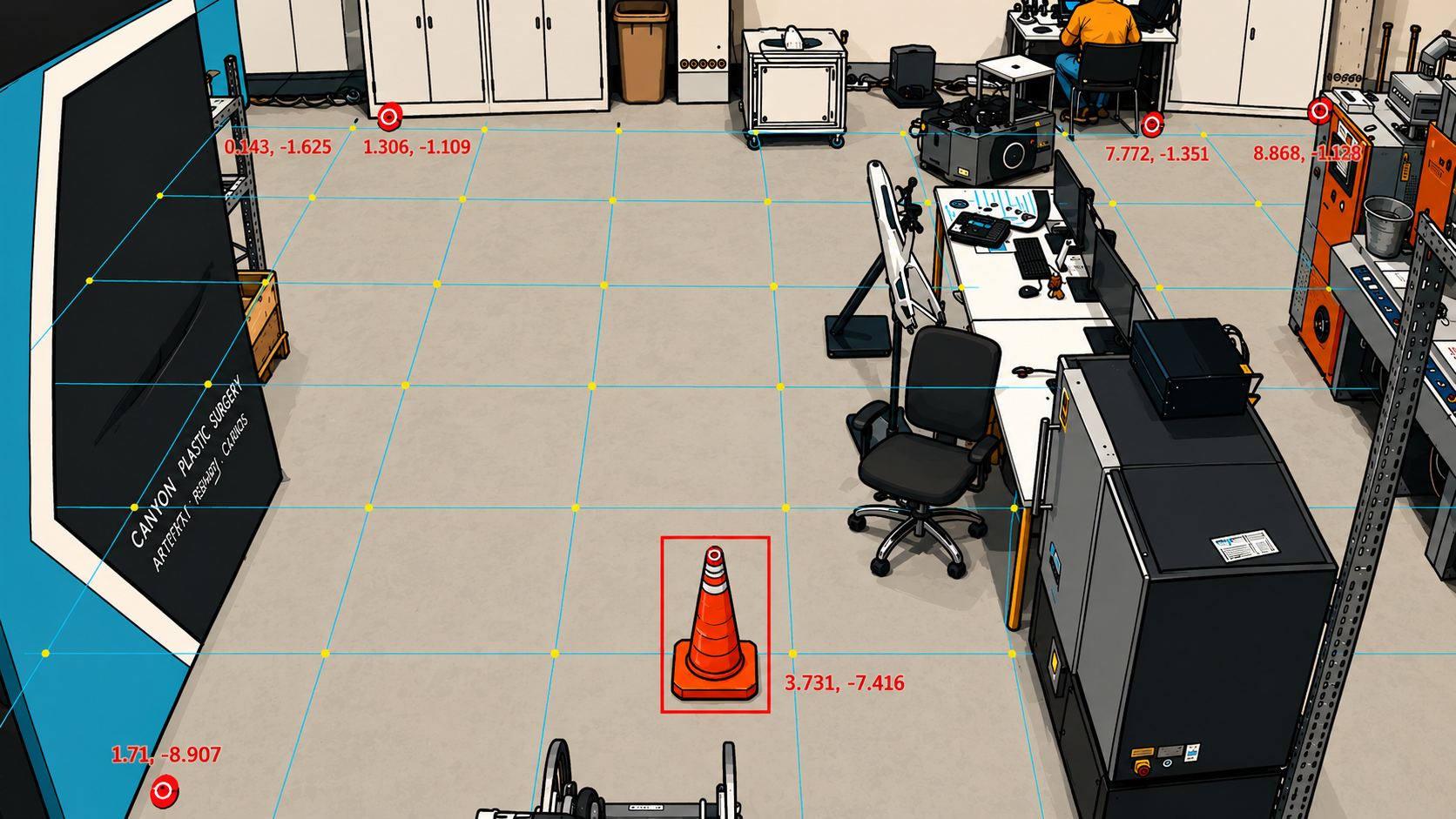
Same tool used in the field. This preview uses a fixed factory frame — click anywhere on the floor to explore pixel→world mapping. Fitted against seven known calibration points (marked in the frame).
SNAPSHOT · recorded
1920 × 1080
CLICK anywhere on the floor
floor mapping · v3
Readout
pixel — , —
world — m, — m
distance —
error —
7 calibration points (known XY)
Your query point
Interactive preview built from a real factory frame and calibration. Not a live stream.